Descripción del proyecto
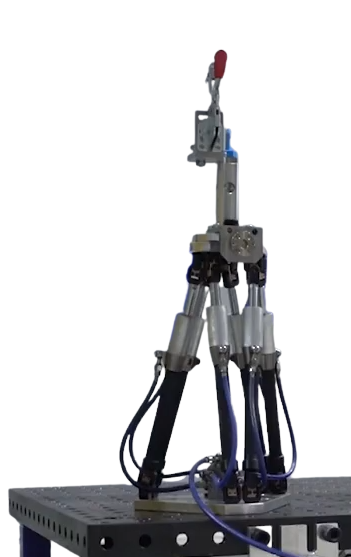
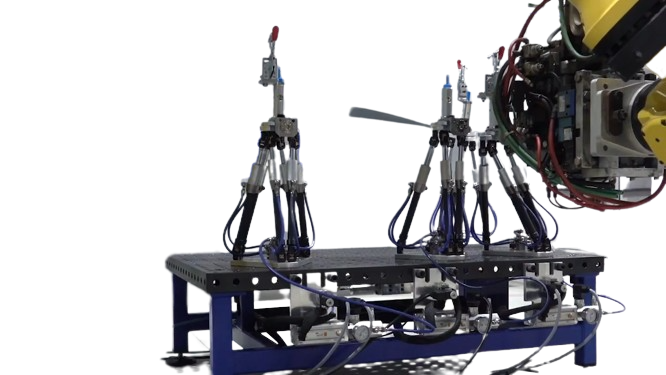
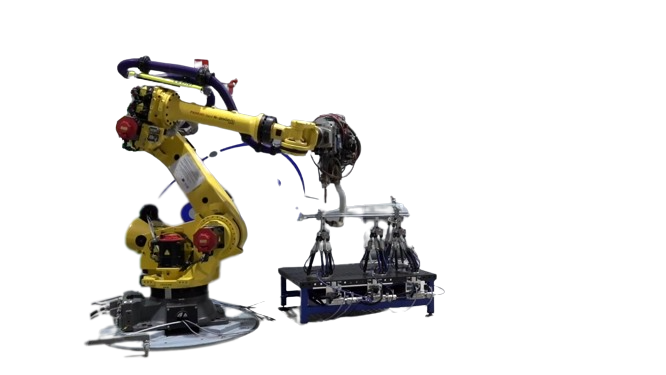
Ofrecen una herramienta flexible que otorga versatilidad a las celdas, permitiendo reconfigurar una misma celda robótica de una serie de producción a otra en cuestión de minutos. La flexibilidad de las mesas de trabajo se combina con eficiencia energética y simplicidad al tratarse de un sistema pasivo, sin motores (movido por el propio robot) y altamente preciso (permite operaciones de mecanizado y taladrado con menos de 14 micras de variación). Proporcionan flexibilidad en la última parte del triángulo de trabajo de una celda robotizada (Robot –Cuna de trabajo – herramienta). Se describe como una flexibilidad de bajo coste.
Innovaciones aportadas
La innovación consiste en un sistema patentado que permite fijar la posición de los Hexapods con tal precisión y repetibilidad, que los habilita para trabajos de mecanizado y taladrado, además de los habituales de soldadura por puntos y soldadura de arco eléctrico.
El bloqueo además no conlleva consumo energético. El consumo se produce solamente en el momento de mover el Hexapod, permaneciendo en consumo cero en todo el periodo de trabajo/producción.
Esta innovación ha sido objeto de protección a nivel de Europa con la concesión de la Patente núm. EP 3 615 823 B1.