Descripción del proyecto
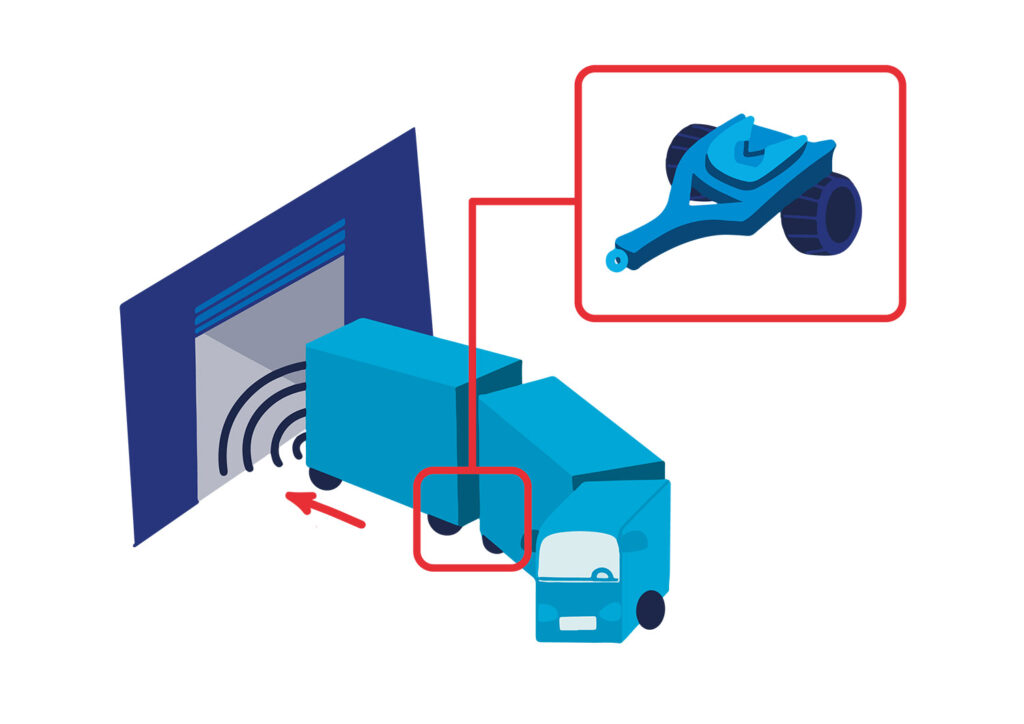
El proyecto ofrece una solución genérica para mejorar las maniobras marcha atrás de todo tipo de vehículos multiarticulados. Para lograrlo, se ha diseñado un sistema direccional que toma en cuenta la geometría del vehículo multiarticulado para mediante un algoritmo de control propio y una situación estratégica del hardware, simplificar el comportamiento marcha atrás de este tipo de vehículos. Con este sistema direccional el vehículo multiarticulado ofrece un manejo muy sencillo para el chofer y le permite realizar maniobras marcha atrás en espacios muy reducidos.
Innovaciones aportadas
Sistema direccional y método de maniobras patentado. Se ha realizado un enfoque y estrategia novedosa, para poder resolver un problema antiguo, para el que hasta la fecha no se había obtenido una solución industrializable. De esta forma se ha podido hallar una solución sencilla, barata e industrializable a un problema complejo.